people
members of the lab or group

Codelab
MMCH, CMU
Pittsburgh, PA 15213
I am a Ph.D. Candidate in Computational Design at Carnegie Mellon University School of Architecture. My research focuses on architectural robotics, robotic perception, and heterogeneous multi-robot construction workflows.
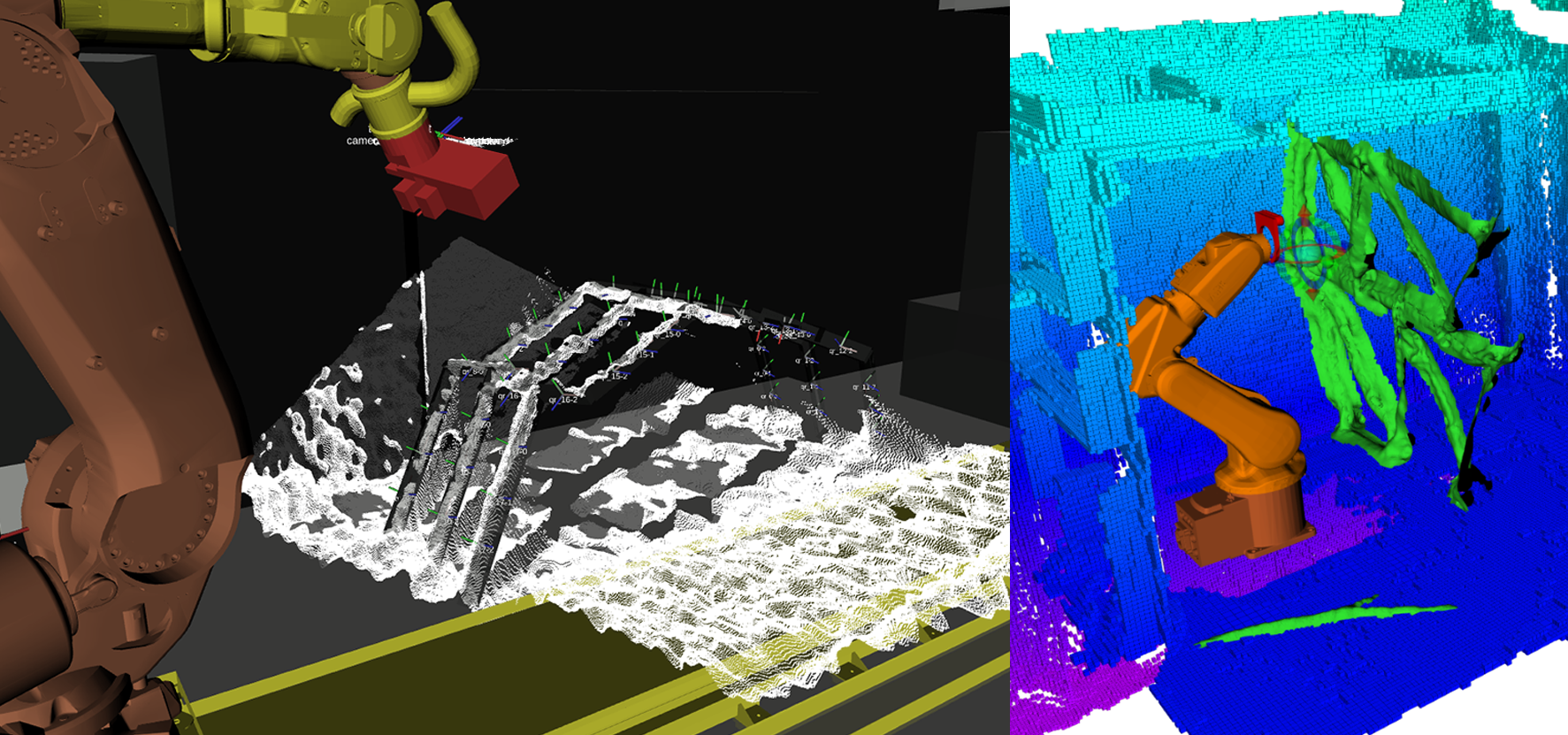
My work develops computational design-to-fabrication methods that connect robotic planning, sensing, and material assembly. I am particularly interested in how robots can operate in less structured construction environments through perception, coordination, and adaptive planning.
My research and teaching explore topics including multi-robot fabrication, human-robot collaboration, mobile manipulation, perception-based assembly, robotic motion planning, and design-to-fabrication workflows. I work across architectural design, robotics, and computation, with a focus on how robotic systems can support construction-scale material processes.
I have taught and developed graduate-level coursework in architectural robotics with perception, including Diffusion policy, ROS-based system integration, depth sensing, AprilTag/QR-based localization, YOLO-based detection and segmentation, MoveIt-based robotic motion planning, and interactive robotic fabrication workflows.